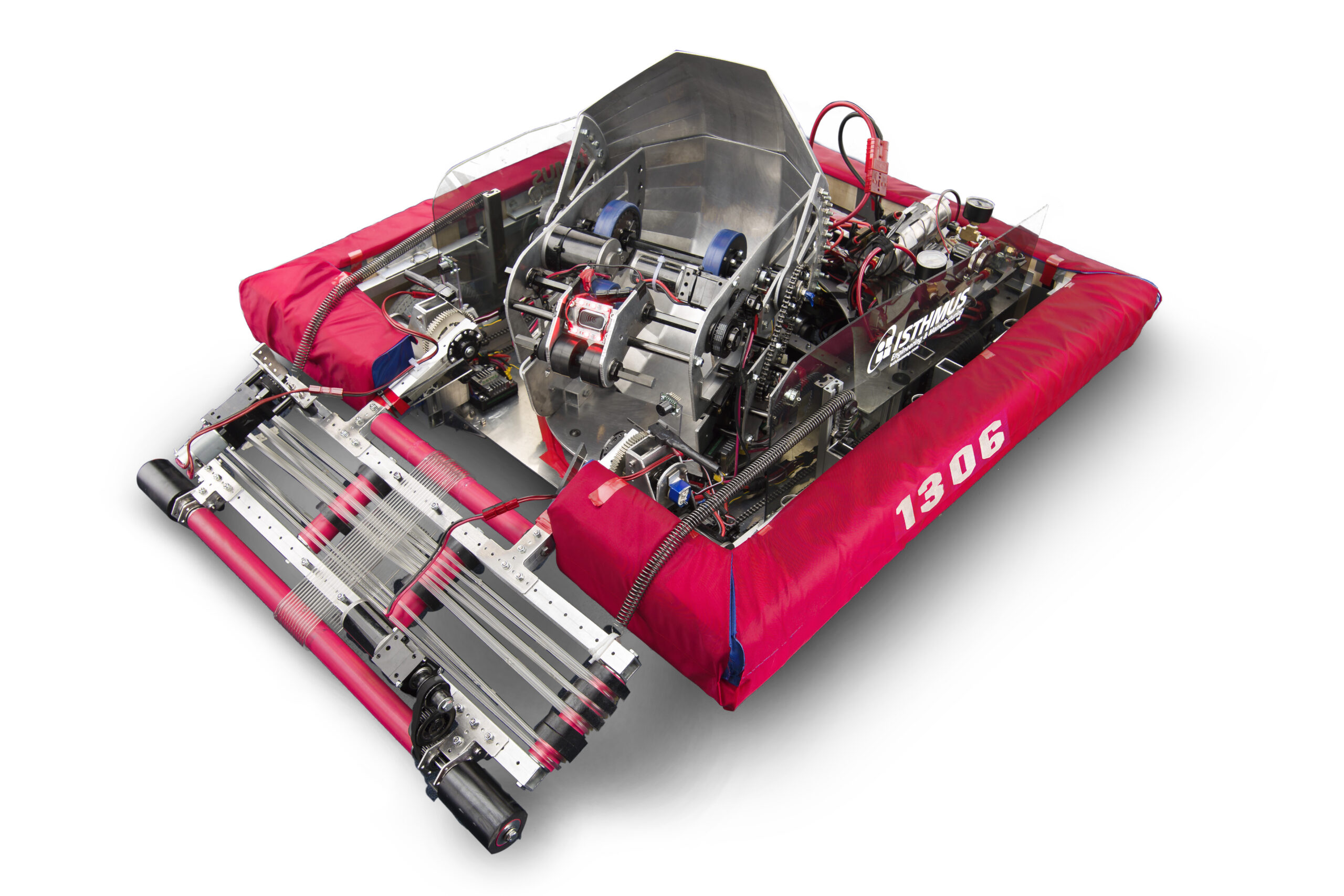
• 6 wheel tank drive • 8″ pneumatic wheels • 5 ft/second in low gear • 15 ft/second in high gear
Intake:
• Articulated via two BAG motors through 150:1 gearboxes • PID loop controls position for intaking boulders, resting, and going over obstacles • Roller geometry allows for boulders to be picked up from multiple directions
Shooter:
• Flywheel powered by Mini-CIM geared 4:3 • Encoder speed control for harder/softer shots • Articulating hood tilts up/down to get any shot trajectory • Automatic vision tracking enables the turret to lock onto the goal and shoot with the right power
Our 2016 robot Nautilus was picked by the number 2 alliance in the Tesla Divison at the World Championships. We made it to the semi-finals and had a very good season overall. Below is a video from match #32 from those qualifiers.